1. Overview¶
Robox RP1 and RP2 are 2 compact motion controllers. They can be programmed in Ladder, in R3 language (Robox Strucuted text) and in C++. The IDE is called RDE (Robox Integrated Environment).
In this part we will see Robox IDE for motion control called RDE, RTE that is the real-time operating system of Robox and the commissioning of AGV using its already existing software written in R3 and Object block (C language).
1.1. Overview¶
1.1.1. Compact Controllers¶
Contoller programs are stored on memory card. RP1 use a compact flash memory and RP2 use a microsd memory. Robox realtime operating system called RTE usually is present in the memory card in the folder /f@. If not present on the memory card the binary file, rte_platform_name_version.bin, can be downloaded from Robox website.
The memory is provided by Robox together with the licence, present in the folder KEY, and the last version of RTE.
Note
ppc-ge is for RP1, arm-a9 is for RP2. RP1 MCU is a PowerPC freescale. RP2 MCU is an Intel ARM9 dual core

RP1: 8 Genral purpose tasks, 32 RULEs (realtime motion tasks)
RP2: 8 Genral purpose tasks, 32 RULEs (realtime motion tasks)
For technical specification, CAD and electrical drawings check Robox website.
On the website you can find other Robox controllers.
1.1.2. Controller program¶
Robox realtime operating system RTE, basically can execute until 8 tasks in time sharing (round robin) and one high priority periodic task called Rule. The maximum (recommended) frequency of the Rule is 200Hz(5ms) for RP1 and 1000Hz (1ms) for RP2.
Taks usually are used for general purpose control like a PLC, and the RULE is used for motion control. RTE can execute until 32 Rules.
Compared to Siemens PLC, tasks can be like OB1. So we can have until 8 OB1 executed in parallel. And Rules can be compared to an interrupt OB e.g. OB35, fixed time interrupt.
Note
Task1 is executed automatically by RTE. Taks1 have to call others task and rules in the initialization phase. This can be done with the instruction mt_en(task_number)
In the following images show how tasks are executed in principle. Schedulars differ from one operating system to another.
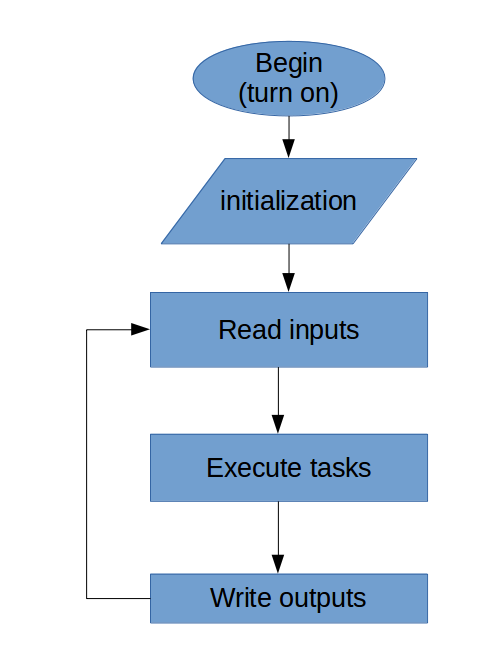
One task execution
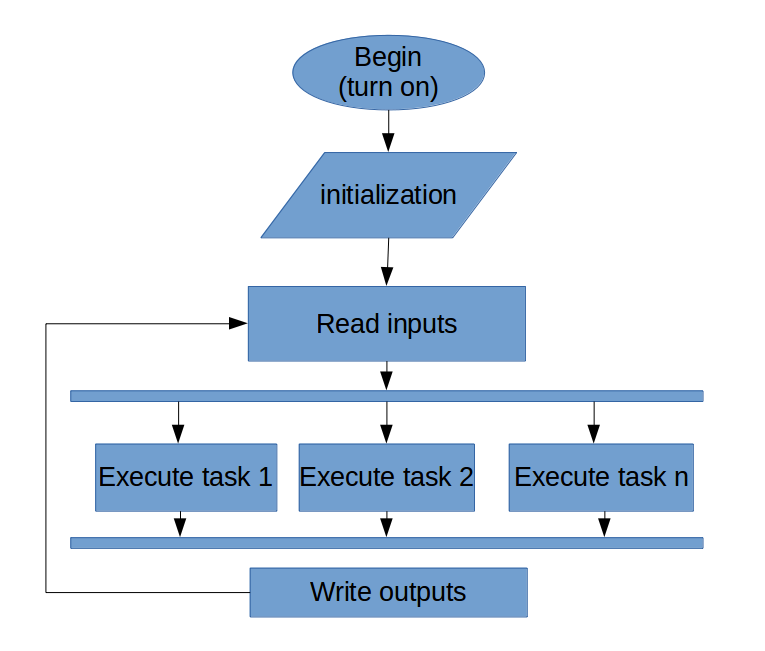
More than one task
Note
More about RTE scheduler, Multitasking and RULEs will be discussed in the chapter related to motion control.
1.1.3. Controllers memory¶
Robox controllers have a memory card where RTE (Real Time Extended) and RPE (Robot Path Executor) binary file are saved, together with the program files, configuration files, etc.
They contain also a retentive memory, which dimension depend on the controller type. Non volatile registers (nvr, nvrr, nvsr) and retentive user defined structures are retained in this memory. You can make a bakup of the values of the retentive memory and save them into a formatted text file usally with extension .stp.
The dimesion of each type of register can be determined in the project configuration, as we will see in RDE chapter. Remember that registers are indexes of memory areas, like Merkers in Siemens PLCs, and can be Integer (nvr), Real (nvrr) and String (nvsr). Robox controllers have also the same types of registers but volatiles (r, rr, sr).