1. RPE - Robox path executor¶
RPE is an extension of RTE. In order to use it, the binary file rpe.bin should be copied in /f@. The binary file of the platform you are using can be downloaded from Robox website.
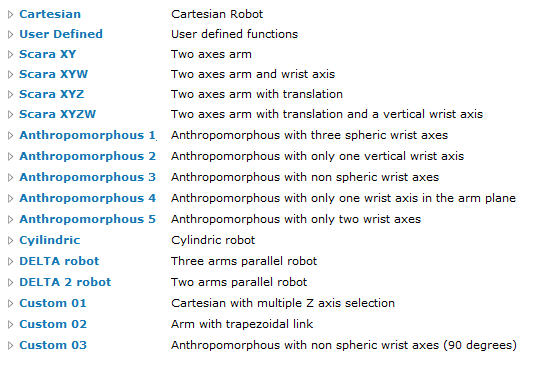
RPE is used to develop robotic applications, using different models of robots: cartesian, anthropomorphus, parallel, etc.
Joint-cartesian models
The path to be executed can be defned through ISO language (G-code) with one of these extensions .mpf, .iso, .nc, or in a path class file with extension .pth.
Path defined in a file using G-code
Path defnied using Path Library
1.1. Axis group¶
In the following animation we show how to create a set of axes. we don’t show how to add all the parameters of the axes. Consult the predefined example RPE: pick and place.
Set of axes
1.2. Library points and paths¶
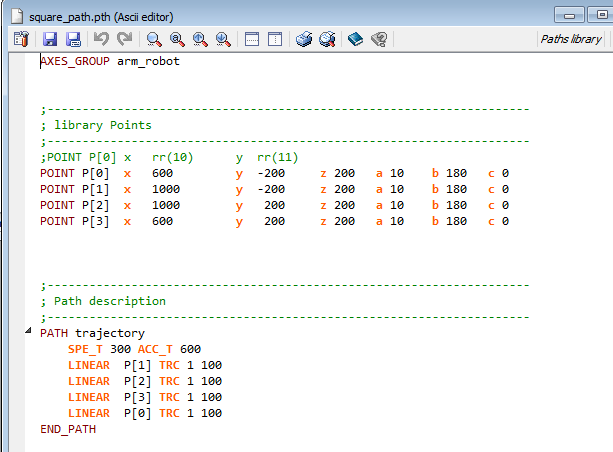
We will see how to define a square using library POINT and PATH defintion.
AXIS_GROUP axis_group_name
POINT point_name
;
END_POINT
PATH path_name
END_PATH
We define the 4 vertices of the square in the space with coordinate (x,y,z,a,b,c). Using the path block we connect points via straight lines. These points and paths belong to the axis group defined in the file.
AXES_GROUP arm_robot
;---------------------------------------------------------------------
; library Points
;---------------------------------------------------------------------
;POINT P[0] x rr(10) y rr(11)
POINT P[0] x 600 y -200 z 200 a 10 b 180 c 0
POINT P[1] x 1000 y -200 z 200 a 10 b 180 c 0
POINT P[2] x 1000 y 200 z 200 a 10 b 180 c 0
POINT P[3] x 600 y 200 z 200 a 10 b 180 c 0
;---------------------------------------------------------------------
; Path description
;---------------------------------------------------------------------
PATH trajecto300 ACC_T 600
LINEAR P[1] TRC 1 100
LINEAR P[2] TRC 1 100
LINEAR P[3] TRC 1 100
LINEAR P[0] TRC 1 100
END_PATH
The name of the points in the file .pth must be the same of the variable of type POINT_L declared in the task. Also the path name must coincide with the task varaible of type PATH.
Example files describing library points and paths :
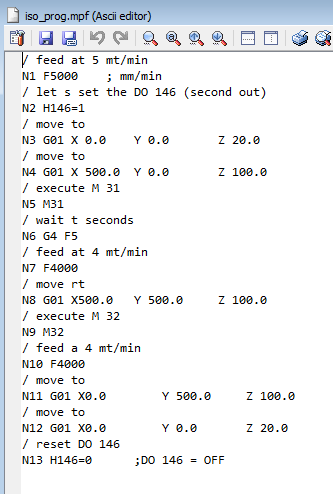
1.3. G-code¶
G-code is a standardized programming language used in CNC machines like lathe, mill, etc. G-code can written manually for simple manufacturing or generated automatically by CAD softwares for complex machining.
The most used code are G and M. G are preparatory commands usally for motion, and M are miscellaneous functions.
G00 Rapid positioning
G01 Linear interpolation
G02 Circular interpolation, clockwise
G03 Circular interpolation, counterclockwise
G21 programming in mm
M02 End of program
M03 Spindle on (clockwise rotation)
M04 Spindle on (counterclockwise rotation)
M09 Coolant off
In RPE documentation, you can find a list of code supported by RPE.
using in RPE . todo
G-code examples :
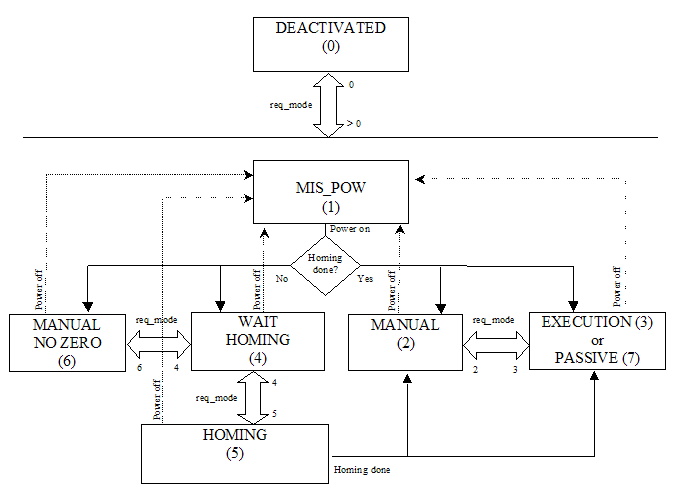
1.4. Operative mode¶
1.5. RPE structures¶
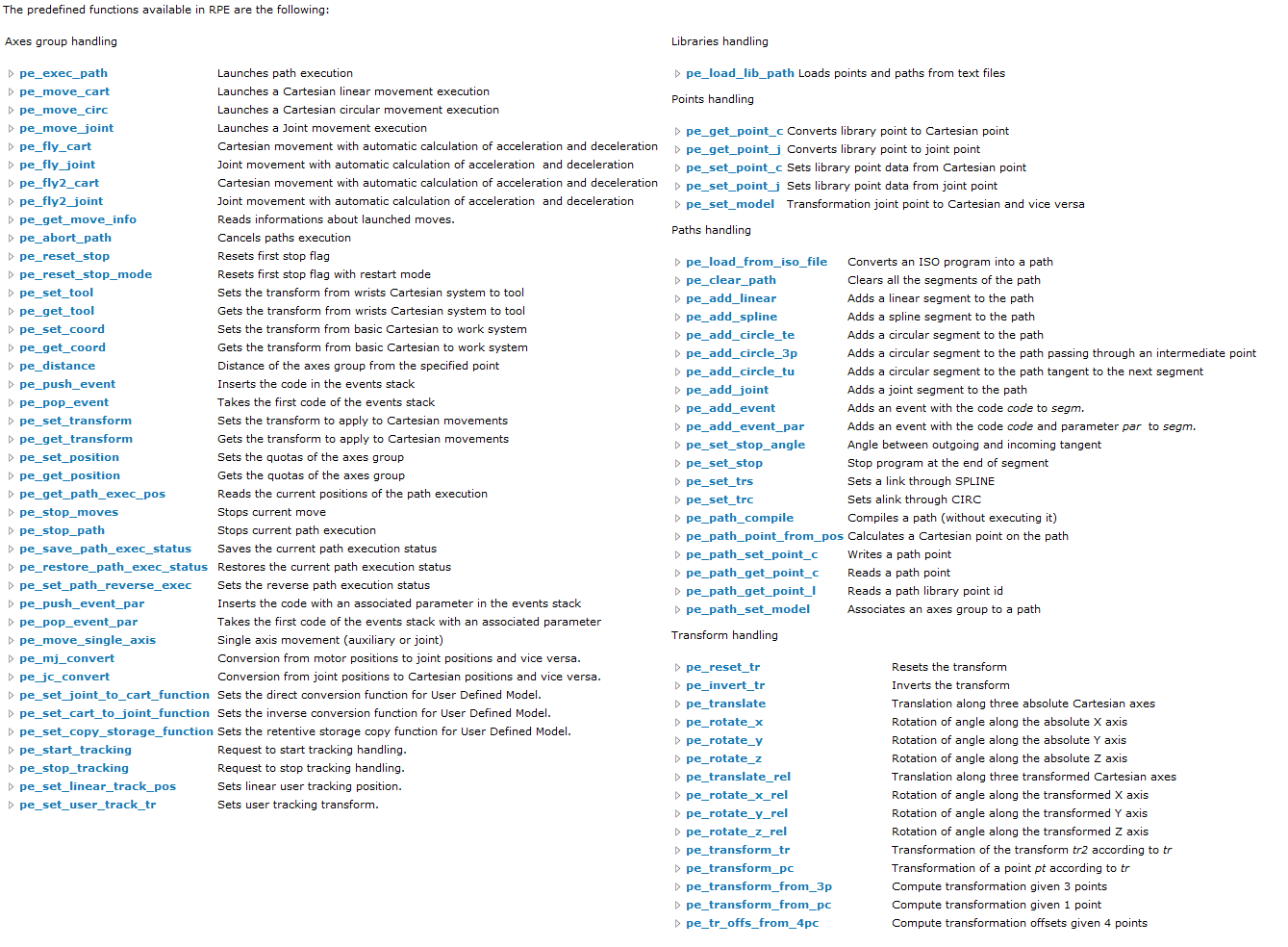
1.6. RPE functions¶